
Piattaforma robotica mobile personalizzata per fornire servizi socialmente utili in ambienti di lavoro quali ospedali, ambulatori, centri di riabilitazione o residenze sanitarie assistite
supporto dell’Università di Genova per il design. Nel contesto del progetto questa piattaforma robotica completamente personalizzata, è utilizzata nello scenario di fisioterapia riabilitativa per pazienti con il morbo di Parkinson, ad Ancona dal partner di progetto IRNCA.
Nello scenario il robot interagisce con il paziente in due momenti:
- accoglienza: il robot accompagna in palestra, il paziente indicatogli dal fisioterapista;
- coaching: il robot esegue la scansione del volto del paziente prima e dopo il trattamento terapeutico; durante l’esecuzione del gioco sempre il robot osserva il paziente nelle sue movenze. Tutte le informazioni recepite vengono inviate in piattaforma cloud che renderà disponibili al fisioterapista
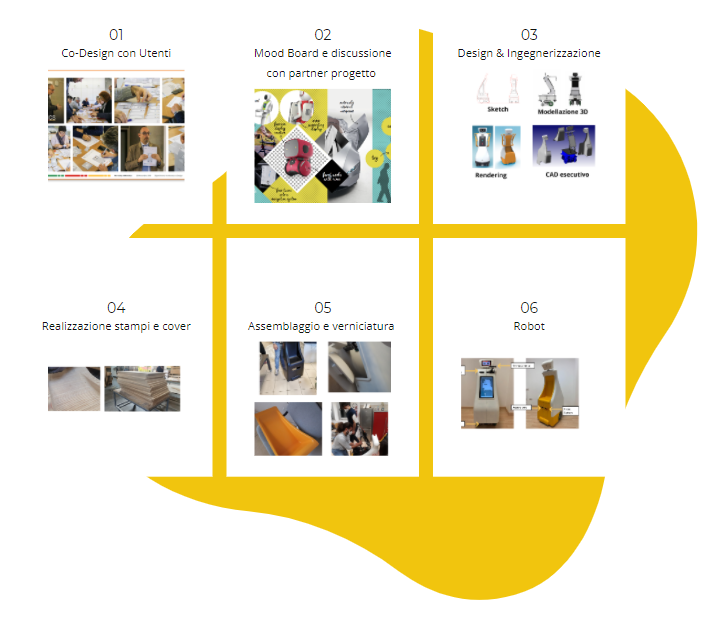
La produzione del dispositivo robotico ha attraversato diverse fasi partendo da un’analisi dei bisogni requisiti tecnici e da una piattaforma robotica già ingegnerizzata e certificata per interagire con persone in ambienti sia interni che esterni. Nella realizzazione del robot sono state coinvolte, in consulenza, aziende specializzate nella prototipizzazione e lo sviluppo delle cover pervenendo a dei mockup e alla realizzazione delle stampe delle cover e all’assemblaggio delle componenti.
La piattaforma robotica
- ha delle dimensioni adeguate e contenute per poter essere usato in ambienti tipo co-housing
- è meccanicamente sviluppata per ridurre al minimo i rischi danni a cose e persone durante l’utilizzo (es. rischio di ribaltamento)
- dotata di:
- sensori per la navigazione (semi)autonoma, evitando ostacoli e pianificando brevi traiettorie;
- componenti per la interazione uomo macchina (es. telecamera, microfoni, speaker, luci/led, schermo);
- nodo di comunicazione per connessione via wifi/BT;
- una architettura embedded che integra tutti i componenti sopra citati e fornisca appropriate capacità computazionali per il controllo e la comunicazione M2M;
- software open source per la facile integrazione nel progetto SI-Robotics.
